使用树莓派进行24小时不间断直播
开始
多余的话就不多说了,今天本文为大家介绍两种使用树莓派来做直播服务器的方法。
方案一 ffmpeg + ffserver搭建流媒体服务器
首先
我们用到的工具有:
硬件方面:
- 树莓派主板一块
- 兼容树莓派的USB摄像头一个
软件方面:
- ffmpeg,负责媒体文件的转码工作,把你服务器上的源媒体文件转成要发出去的流媒体文件。
- ffserver,负责响应客户端的流媒体请求,把流媒体数据发送给客户端,相当与一个小型的服务端。
具体的工作方式就如下图所示:

多个输入源被“喂”到广播服务器,这些多媒体内容就会分发到多个客户端。上图的目的是显示地表明你的流系统能够被分成多个块部署到网络上,允许你广播不同的在线内容,而不需要改变流媒体系统的结构。
配置
无论是树莓派官方摄像头模块还是其他兼容的USB摄像头,连接好摄像头之后,运行命令去启用摄像头:
sudo raspi-config
ffserver.conf,ffserver启动时的配置文件,在这个文件中主要是对网络协议,缓存文件feed1.ffm(见下述)和要发送的流媒体文件的格式参数做具体的设定。
feed1.ffm,可以看成是一个流媒体数据的缓存文件,ffmpeg把转码好的数据发送给ffserver,如果没有客户端连接请求,ffserver把数据缓存到该文件中。
下面就是一个ffserver.conf的一个例子:
Port 8090 # Port to bind the server to
BindAddress 0.0.0.0
MaxHTTPConnections 2000
MaxClients 1000
MaxBandwidth 10000 # Maximum bandwidth per client
# set this high enough to exceed stream bitrate
CustomLog -
NoDaemon # Remove this if you want FFserver to daemonize after start
<Feed feed1.ffm> # This is the input feed where FFmpeg will send
File ./feed1.ffm # video stream.
FileMaxSize 64M # Maximum file size for buffering video
ACL allow 127.0.0.1 # Allowed IPs
</Feed>
<Stream test.webm> # Output stream URL definition
Feed feed1.ffm # Feed from which to receive video
Format webm
# Audio settings
AudioCodec vorbis
AudioBitRate 64 # Audio bitrate
# Video settings
VideoCodec libvpx
VideoSize 720x576 # Video resolution
VideoFrameRate 25 # Video FPS
AVOptionVideo flags +global_header # Parameters passed to encoder
# (same as ffmpeg command-line parameters)
AVOptionVideo cpu-used 0
AVOptionVideo qmin 10
AVOptionVideo qmax 42
AVOptionVideo quality good
AVOptionAudio flags +global_header
PreRoll 15
StartSendOnKey
VideoBitRate 400 # Video bitrate
</Stream>
<Stream status.html> # Server status URL
Format status
# Only allow local people to get the status
ACL allow localhost
ACL allow 192.168.0.0 192.168.255.255
</Stream>
<Redirect index.html> # Just an URL redirect for index
# Redirect index.html to the appropriate site
URL http://www.ffmpeg.org/
</Redirect>ffserver启动时默认查看 /etc/ffserver.conf 配置文件,你可以通过-f选项控制查阅的配置文件。
ffserver -f ffserver.conf
运行结果如下所示的话,那么ffserver就算是启动成功了。

打开http://localhost:8090/status.html可以看到当前server中各个流的状态。
接入视频流
ffserver启动之后,就可以向
http://localhost:8090/feed1.ffm接入视频流。
注意,这里不需要指定编码格式,FFserver会重新编码。
视频流的来源可以是文件、摄像头或者录制屏幕。
接入视频文件
ffmpeg -i testvideo.mp4 http://localhost:8090/feed1.ffm接入录制屏幕
ffmpeg -f x11grab -r 25 -s 640x512 -i :0.0 -f alsa -i pulse http://localhost:8090/feed1.ffm
这里有两个-f,第一个指的是视频流,第二个指的是音频流。视频流是抓取屏幕形成视频,-r设置帧率为25帧/s,-s设置抓取图像大小为640x512,-i设置录制视频的初始坐标。音频流设置为alsa(Advanced Linux Sound Architecture),从Linux系统中获取音频。这其中这样ffmpeg可以录制屏幕feed到feed1.ffm中。
接入摄像头直播
ffmpeg -f video4linux2 -s 640x480 -r 25 -i /dev/video0 -f alsa -i pulse http://localhost:8090/feed1.ffm方案二 avconv 和 GStreamer 用于采集摄像头捕获的视频流并推送到 RTMP 服务
首先
我们用到的工具有:
硬件方面:
- 树莓派主板一块
- 兼容树莓派的USB摄像头一个
软件方面:
- avconv 和 GStreamer 用于采集摄像头捕获的视频流并推送到 RTMP 服务
- NGINX 和 RTMP 模块,用于接收视频流,同时提供视频发布功能
安装&配置
因为这里我们要用到nginx的rtmp模块作为服务端,而系统自带的apt安装的nginx是没有这个模块的,所以我们需要先安装后移除nginx然后再手动编译(安装是为了下载好相关依赖)。
sudo apt-get update
#安装 nginx
sudo apt-get -y install nginx
#移除 nginx
sudo apt-get -y remove nginx
sudo apt-get clean
#清空 nginx 的配置文件
sudo rm -rf /etc/nginx/*
#安装编译用的模块
sudo apt-get install -y curl build-essential libpcre3 libpcre3-dev libpcre++-dev zlib1g-dev libcurl4-openssl-dev libssl-dev
#创建存放网页的目录给 nginx 使用
sudo mkdir -p /var/www
#创建编译用的目录
mkdir -p ~/nginx_src
cd ~/nginx_src
#下载 nginx 源码包
wget http://nginx.org/download/nginx-1.11.8.tar.gz
#下载 nginx-rtmp-module 源码包
wget https://github.com/arut/nginx-rtmp-module/archive/master.zip
tar -zxvf nginx-1.11.8.tar.gz
unzip master.zip
cd nginx-1.11.8
#设定编译参数
./configure --prefix=/var/www --sbin-path=/usr/sbin/nginx --conf-path=/etc/nginx/nginx.conf --pid-path=/var/run/nginx.pid --error-log-path=/var/log/nginx/error.log --http-log-path=/var/log/nginx/access.log --with-http_ssl_module --without-http_proxy_module --add-module=/home/pi/nginx_src/nginx-rtmp-module-master
#开始编译安装
make
sudo make install配置 nginx
sudo gedit /etc/nginx/nginx.conf
在末尾添加
rtmp {
server {
listen 1935;
chunk_size 4096;
application live {
live on;
record off;
}
}
}重启 nginx 服务。
sudo service nginx start
安装 avconv 和 GStreamer
sudo apt-get update
sudo apt-get install libav-tools
#安装 GStreamer
sudo apt-get install gstreamer1.0-tools
#安装 GStreamer 扩展组件
sudo apt-get install libgstreamer1.0-0 libgstreamer1.0-0-dbg libgstreamer1.0-dev liborc-0.4-0 liborc-0.4-0-dbg liborc-0.4-dev liborc-0.4-doc gir1.2-gst-plugins-base-1.0 gir1.2-gstreamer-1.0 gstreamer1.0-alsa gstreamer1.0-doc gstreamer1.0-omx gstreamer1.0-plugins-bad gstreamer1.0-plugins-bad-dbg gstreamer1.0-plugins-bad-doc gstreamer1.0-plugins-base gstreamer1.0-plugins-base-apps gstreamer1.0-plugins-base-dbg gstreamer1.0-plugins-base-doc gstreamer1.0-plugins-good gstreamer1.0-plugins-good-dbg gstreamer1.0-plugins-good-doc gstreamer1.0-plugins-ugly gstreamer1.0-plugins-ugly-dbg gstreamer1.0-plugins-ugly-doc gstreamer1.0-pulseaudio gstreamer1.0-tools gstreamer1.0-x libgstreamer-plugins-bad1.0-0 libgstreamer-plugins-bad1.0-dev libgstreamer-plugins-base1.0-0 libgstreamer-plugins-base1.0-dev
采集与呈现视频流
gst-launch-1.0 -v v4l2src device=/dev/video0 ! 'video/x-raw, width=1024, height=768, framerate=30/1' ! queue ! videoconvert ! omxh264enc ! h264parse ! flvmux ! rtmpsink location='rtmp://树莓派的IP地址/live live=1' &采用以上命令就可以在后台采集USB摄像头拍摄的直播内容并推送到rtmp服务端上了。
呈现直播视频画面:
1、使用 RTMP 播放器播放视频流
例如 VLC 等播放器(桌面版和手机版均有)支持 RTMP 视频流播放,填入 rtmp://树莓派的IP地址/live 即可播放。不过这个软件有数十秒的缓冲延迟,需要设定缓冲时间来缩短延迟。
2、推送至斗鱼直播平台观看
你可能注意到了 GStreamer 这个命令中有 location 这个参数。这个参数是设定采集到的视频流推向哪里,通过设定这个参数可以将视频流推向任何支持 RTMP 协议的服务器。
斗鱼平台同样采用了 RTMP 协议传输直播视频,首先获取斗鱼的 RTMP 推流地址。开启了直播室之后可以获得推流码。注意,斗鱼的推流码是有时限的,取到推流码需要尽快使用以免过期。






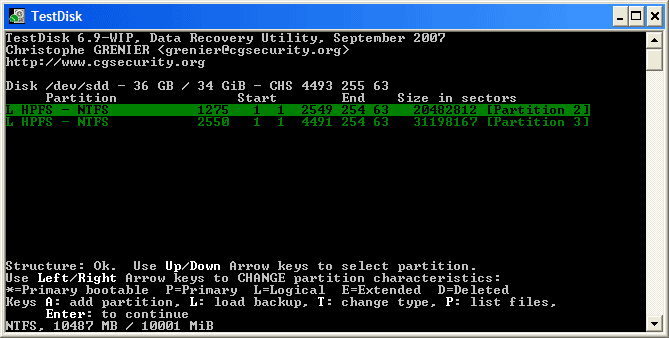 + 高亮这个分区并按 p 来列出文件 (若要返回前一页,请按 q ).
+ 这里所有的目录和文件都正确列出来了。
+ 按 Enter 键继续。
+
+ 高亮这个分区并按 p 来列出文件 (若要返回前一页,请按 q ).
+ 这里所有的目录和文件都正确列出来了。
+ 按 Enter 键继续。
+ 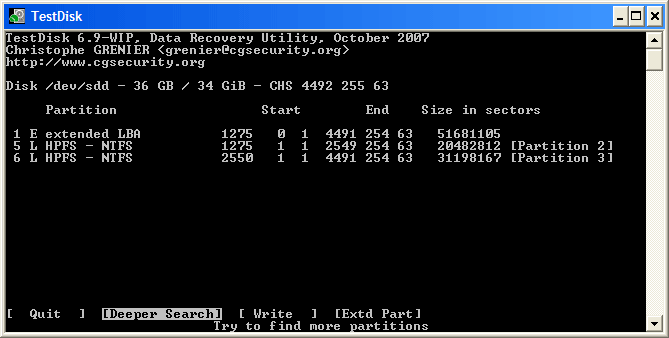 (经过笔者的几次实验和朋友的反馈,其实到了这一步已经能够解决80%以上的问题了!)
(经过笔者的几次实验和朋友的反馈,其实到了这一步已经能够解决80%以上的问题了!)